作者:非著名心脏介入术者
昨天阅读了严道医声网发表的《JACC: Asia:CTO再度进化——从“心中有”,到“眼中见”》。
现将当时查到的资料及心得分享如下:

这篇JACC: Case Reports的文章题目为《New CTO-Specific IVUS: AnteOwl Success in Previously Failed CTO Case Treated With Navifocus IVUS》(J Am Coll Cardiol Case Rep. 2020 Jun, 2 (6) 961–965),作者为Satoshi Suzuki等教授。
文章介绍了一种针对CTO病变的IVUS系统,2012年文章作者研发了Navifocus WR IVUS系统 (Navi-IVUS; Terumo); 在Navi-IVUS指导下开通CTO的过程中,笔者意识到导丝的三维显示对于精确操控导丝非常必要,因此,又开发出AnteOwl WR IVUS系统(AO-IVUS; Terumo),并实施头端探测技术。AO-IVUS是Navi-IVUS的升级版,增加了回拉传感器系统,在实施头端探测技术时可以实时显示导丝头端的情况。于2019年10月开始在临床实践中使用AO-IVUS系统。
补充资料
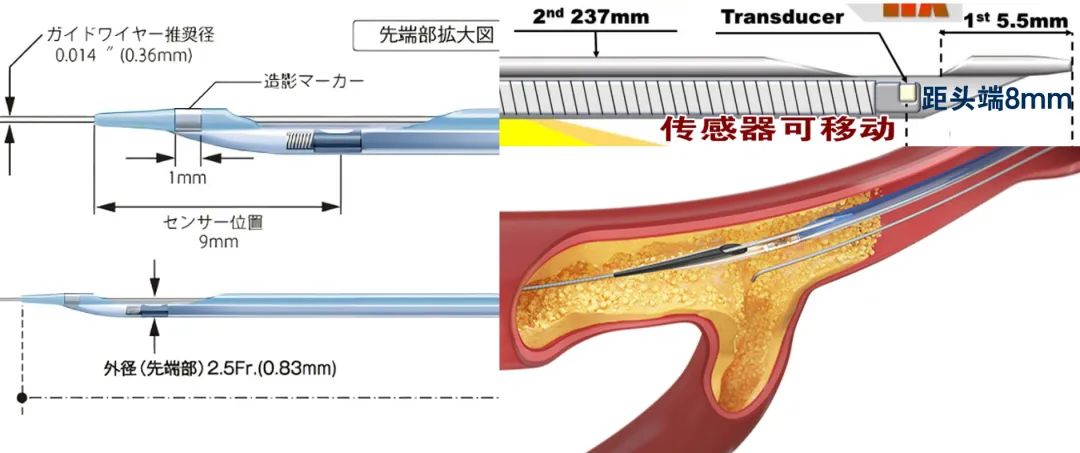
所谓AnteOwl WR IVUS系统,实际上是terumo公司研发的CTO专用IVUS,其外径小,传感器距离头端很短(8mm),可以最大可能提高内膜下行进的通过性,并减少对血管内膜下区域的损伤。
尤其有意思的是,该套IVUS系统的传感器可以在封套内移动。
官网数据谈到:カテーテルを動かすことなく、観察位置の微調整が可能に,VISICUBEにより最大145mmの距離を9mm/秒のスピードでプルバックが可能,コイルマーカーを廃止した先端部,最先端位置も透視下で確認可能にするため造影
(导管封套不动的情况下,传感器可以9mm/s的速度回拉145mm。手术时,IVUS助手操作IVUS的传感器部分,来回移动传感器以便于对导丝头端的情况实时观察。其取消了头端的标记点,但是前端可显影,透视下可见。)
病例信息
一名患有陈旧性下壁心肌梗死的50岁男子接受最佳药物治疗后,仍然反复发作心绞痛,是因为其存在LCX-CTO余病变。
既往病史
该患者1年前因急性下壁心肌梗死,通过急诊PCI对右冠脉病变进行了急诊开通再通。术后第20天,拟开通LCX-CTO病变,由于没有逆向侧支且CTO出口部位为分叉病变,因此采用了正向导丝升级策略,包括平行导丝和Navi-IVUS指导下导丝前向技术。然而,导丝无法通过CTO病变,并产生了巨大的内膜下腔隙。
此次复查造影,显示LCX-CTO病变图像与首次PCI手术前相同。

此次拟使用AO-IVUS进行指导开通LCX-CTO病变。股动脉8F导管,经Corsair微导管送入第一根XT-R导丝,XT-R导丝似乎进入了之前手术产生的内膜下区域。将Corsair微导管送至超出CTO入口3 cm,为IVUS导管的送入留出空间,之后将XT-R导丝改为Ultimate Bros3导丝,UB3导丝为推送IVUS导管提供了良好支撑。
彩图显示了手术前血管造影图像和IVUS图像,这表明导丝在出口处进入内膜下区域是因为此处刚好存在钙化斑块。


该项技术分两步实施:
1)将血管局部结构的IVUS断层信息匹配到血管造影图像(辨别清楚要攻打的方向);
2)在IVUS指导下实时显示的导丝头端行进方向,将第二根导丝精确地通过病变(实时可视化指导攻打)。
首先,下图说明了如何将位置信息从IVUS图像传输到血管造影图像。

将第二根CP12导丝推送到距离CTO出口1厘米处。透视下观察,CP12导丝尖端面向左侧,透视下将其旋转,使尖端直接面向术者,此次留存IVUS图像,明确IVUS图像中几点钟的导丝方向是代表着透视下的正前方,这就是头端探测第一步,即明确术者大概是站在哪个方向去看IVUS图像=术者正在向正前方看造影图像。
也就是说,IVUS图像上的6点钟,就是造影图像上导丝的方向(正前方),二者在头脑里匹配完成后,就很容易在造影图像知晓大概的局部血管结构立体构型。
当然,IVUS发现CTO出口位于3点半方向,也就是术者右侧。
其次,下图显示如何使用头端探测方法实现IVUS指导下的实时可视化开通。

有了刚刚已经匹配好的导丝位置,只需要逆时针旋转CP12导丝就可以将其尖端指向右侧(IVUS实时观察到导丝精准的指向3点半方向)。然后CP12导丝前进并进入远端真腔,但是导丝尖端指向分支,因此导丝顺时针旋转(记住秘诀,当导丝初始位置面向正前方时,体外逆时针等于向右,顺时针旋转等于向左。初始位置向后时,前述情况相反)以将其尖端指向主支远端,并进一步送至主支远端
IVUS指导下的实时可视化开通仅8分钟就完成了,支架植入,手术完成。
讨论
基于AO-IVUS的实时可视化开通方法,很轻松的开通了一年前基于Navi-IVUS无法通过的CTO病变。
对于CTO-PCI,使用带有回拉传感器系统的IVUS来实时观察CTO病变中的第二根导丝,短头端小外径也减少了内膜下血管损伤。这种回拉传感器系统可以实时了解导丝头端的形态。自AO-IVUS问世以来,CTO开通的困难主要集中在由于严重钙化而导丝无法通过,以及由于血管严重弯曲而无法操控导丝,在这种情况下,应考虑逆向途径或ADR。(这篇文章发表时,还没有发现可以实施TD-ADR——自由的选择正向再入部位,2022年9月,作者发现CTO体部也可以实施TD-ADR。当然,那时候还没有史上最强的CP12ST导丝,2021年,穿透力最强的新款ADR导丝Conquest Pro 12 Sharpened Tip(CP12ST)导丝才问世)
基于AO-IVUS的实时可视化开通手术中,术者和IVUS助手均具有特定的角色。IVUS助手仅使用IVUS图像通过头端探测方法构建3D图像,并依次告诉术者旋转导丝的方向和角度(包括轻重缓急和进度),以使其遵循IVUS助手在脑海中创建出优化路线(VR全景不是梦!)。术者则主要使用透视图像来根据IVUS助手的指令操纵导丝。因此,对于术者来说,最好在血管造影图像上在脑海里构建出CTO出口附近的局部立体结构。